IFR 飞行技术 BASIC1
1. Radio nav frequency setting
设置无线电频率,可以从nearest中寻找,同时在PFD中选择正确的来源source
设置飞行航迹,可以通过调整CRS或者直接点击Direct crouse进行选择
判断频率选择是否正确,VOR会在选择框中下方显示名称,在右上角显示识别码,NDB需要听摩斯电码,GPS需要查看GTN中的模式,TERM、LPV、ENRTE
2. Levelling of on a GNSS or VOR tracks
在GNSS或者VOR航迹上进行平飞
2.1 当前位置超某台飞行
当前位置飞向某台或某点,GNSS使用Direct功能,电台使用直飞Direct course功能
调整航向,保证HSI上的洋红色菱形标识对准HSI所示径向线箭头
2.2 修正径向线上的飞行
当偏离小于一半刻度或少于5°,以10°修正回原来航迹
当偏离大于一半刻度或大于5°,以20°修正回原来航迹
3. Use of HSI and RMI
使用HSI和RMI进行导航
3.1 实现向台、背台某一径向线的飞行:
同上“Levelling of on a GNSS or VOR tracks”所述
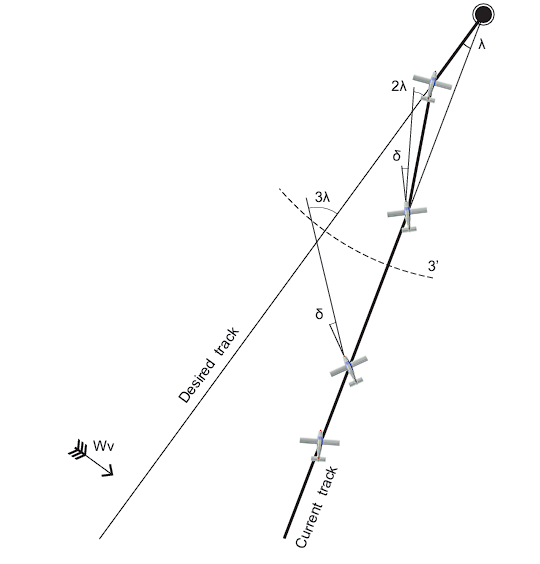
3.2 切入新径向线(小于20度)的径向线进行飞行
离台三分钟以上:3*径向线之差,最大切入角度为45度
离台三分钟内:2*径向线之差,最大切入角度30度
飞行过程中,计算切入航向
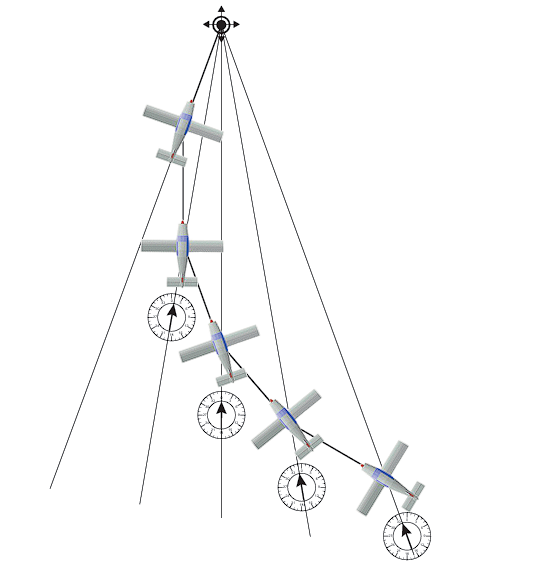
3.3 切入新径向线(大于20度,小于50度)的径向线进行飞行
逐渐修正方法,在举例所需径向线10nm的时候进行修正
使用RMI进行判断,在当前径向线的基础上,超目标径向线偏转30度,如果相对方位达到40度,则修正回30度,来回修正
最后到达指定径向线进行飞行
4. Lead distant and List angle
切入新轨迹时,转弯提前量,分别可以用距离和角度来进行衡量
4.1 Lead distant
GS为地速,在racetrack程序中或者其他特殊情况可能需要加上0.3,一个更多的提前量
4.2 Lead angle
GS为地速,D为DME距离
4.3 Holding and base turn
GS为地速,T为程序时间
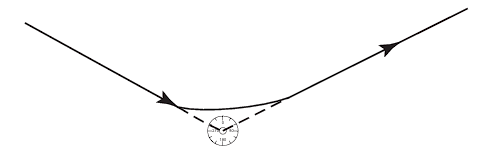
5. FLY BY and FLY OVER
5.1 FLY BY
5.1.1 VOR
在进入信号锥形盲区的时候开始转向目标航向
如果某点是由两个径向线的交点定义,大于60度的情况,使用Lead方法进行判断
小于60度,则使用fly-over方法飞行
5.1.2 RNAV
在HSI中显示的偏离杆为系统自动计算出来的偏离杆,现代化HSI(TB-20)中,新的航迹会自动加载到HSI中
5.2 FLY OVER

5.2.1 VOR NDB
判断是否过台:ADF针头清晰的指向后方,VOR触发初始的FROM型号
0°-30°,使用10°切入目标径向线
30°-60°,使用20°切入目标径向线
大于60°,使用30°切入目标径向线
6. DME use
使用DME进行飞行
6.1 计算DME弧线长度
w为角度差,单位为度,R为DME弧半径,单位为海里
7. Decending on different prescribed paths with various speeds
在不同的下滑角度上保持不同的速度
1 in.Hg 在保持相同速度的情况下将产生100ft/min的下降速率
1 in.Hg 在保持垂直速率的情况下将产生5kt的速度变化值
例如,3°下滑角,梯度为5%,下降速率为速度*梯度,100kt下,为500ft/min
保持100kt的情况下,我需要在当前平飞油门配置下减小5in.Hg维持相同速度下500ft/min的飞行